| Модель | КДЖР130-3100М | |
| Номер оси | 4 | |
| полезная нагрузка | 130кг | |
| Повторить позиционирование | ± 0.5mm | |
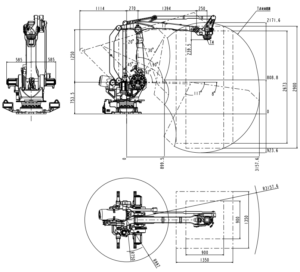
| Макс Армспан | 3157 мм | |
| Диапазон движения | J1 | ± 182 ° |
| J2 | +97°, -50° | |
| J3 | +122°, -22° | |
| J4 | ± 360º | |
| Макс. скорость | J1 | 129 ° / с |
| J2 | 132 ° / с | |
| J3 | 132 ° / с | |
| J4 | 299 ° / с | |
| Максимальное ускорение | J1 | 126 ° / с2 |
| J2 | 401 ° / с2 | |
| J3 | 458 ° / с2 | |
| J4 | 2291 ° / с2 | |
| Момент инерции | J4 | 23 кг.м² |
| Вес тела робота | 1400кг | |
| Мощность Мощность | 17.5kVA | |
| Кабинет Размер | 650x750x1150mm | |
| Кабинет Вес | 140кг | |
| Источник | 3-фазный 5-проводной 380 В переменного тока(+10%,-10%) |
|
| Установка формы | земля | |
| сектор | Паллетирование, обработка, погрузка, сбор, упаковка и т. д. | |