| Модель | QJR210-1 | |
| Номер оси | 6 | |
| полезная нагрузка | 210кг | |
| Повторить позиционирование | ± 0.2mm | |
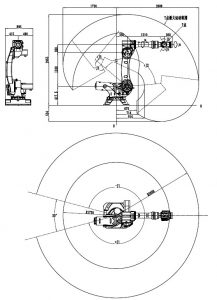
| Макс Армспан | 2688 мм | |
| Диапазон движения | J1 | ± 165º |
| J2 | ﹢85°,﹣50° | |
| J3 | ﹢75°,﹣160° | |
| J4 | ± 360º | |
| J5 | ± 120º | |
| J6 | ± 360º | |
| Макс. скорость | J1 | 100º/с |
| J2 | 80º/с | |
| J3 | 95º/с | |
| J4 | 130º/с | |
| J5 | 120º/с | |
| J6 | 200º/с | |
| Допустимый крутящий момент | J4 | 1200N.m |
| J5 | 1200N.m | |
| J6 | 650N.m | |
| Момент инерции | J4 | 84 кг.м² |
| J5 | 84 кг.м² | |
| J6 | 55 кг.м² | |
| Вес тела робота | 1257кг | |
| Мощность Мощность | 30.6kVA | |
| Кабинет Размер | 650 * 750 * 1150мм | |
| Кабинет Вес | 140кг | |
| Источник | Трехфазный пятипроводной | |
| Установка формы | земля | |
| сектор | Сварка, паллетирование, погрузка и разгрузка, обработка, полировка и шлифовка, сборка. | |