| Модель | QJR6-2700P | |
| Номер оси | 6 | |
| полезная нагрузка | 6кг | |
| Повторить позиционирование | ± 0.5mm | |
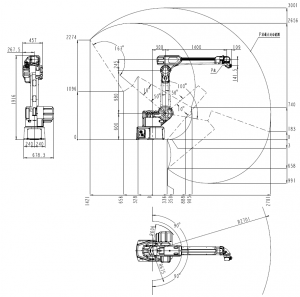
| Макс Армспан | 2701 мм | |
| Диапазон движения | J1 | ± 95º |
| J2 | ﹢102°,﹣53° | |
| J3 | ﹢80°,﹣80° | |
| J4 | ± 260º | |
| J5 | ± 270º | |
| J6 | ± 260º | |
| Макс. скорость | J1 | 108 ° / с |
| J2 | 103 ° / с | |
| J3 | 115 ° / с | |
| J4 | 360 ° / с | |
| J5 | 360 ° / с | |
| J6 | 360 ° / с | |
| Допустимый крутящий момент | J4 | 10.96 Н·м |
| J5 | 10.96 Н·м | |
| J6 | 4.90 Н·м | |
| Момент инерции | J4 | 0.25 кг.м2 |
| J5 | 0.25 кг.м2 | |
| J6 | 0.05 кг.м2 | |
| Вес тела робота | 400кг | |
| Мощность Мощность | 3.9kVA | |
| Кабинет Размер | 650 * 750 * 1150мм | |
| Кабинет Вес | 140кг | |
| Источник | Трехфазный четырехпроводной | |
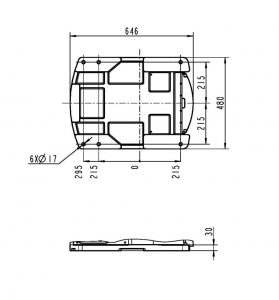
| Установка формы | Наземный | |
| сектор | Для рисования нет точки сингулярности, что значительно упрощает обучение программированию. | |