| Модель | CR3-066S1-CS01 | |
| Рука робота Net Eight (без кабелей) |
15кг | |
| полезная нагрузка | 3KG | |
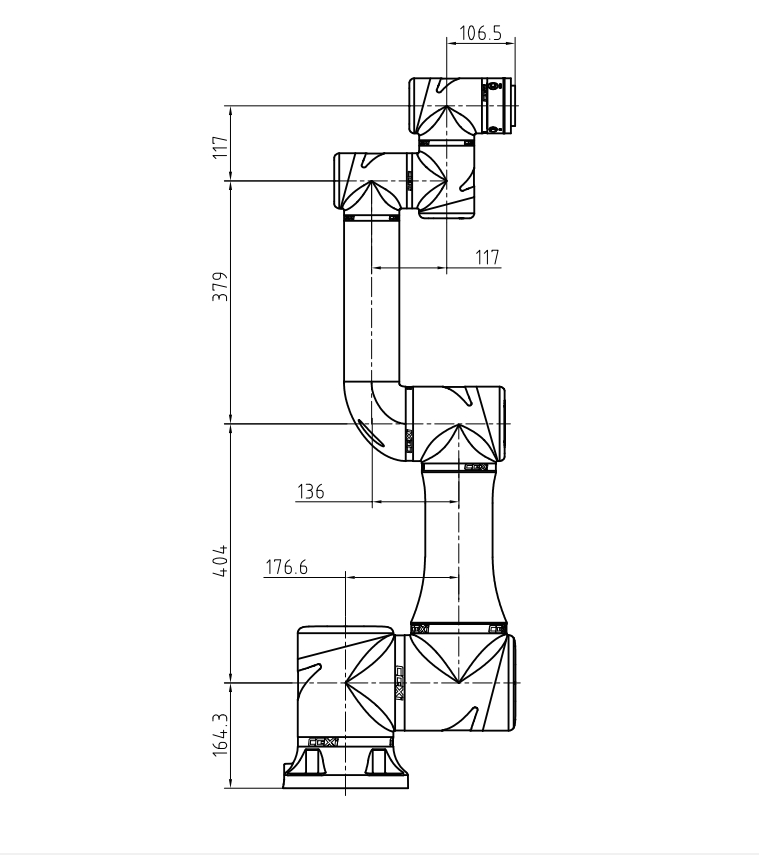
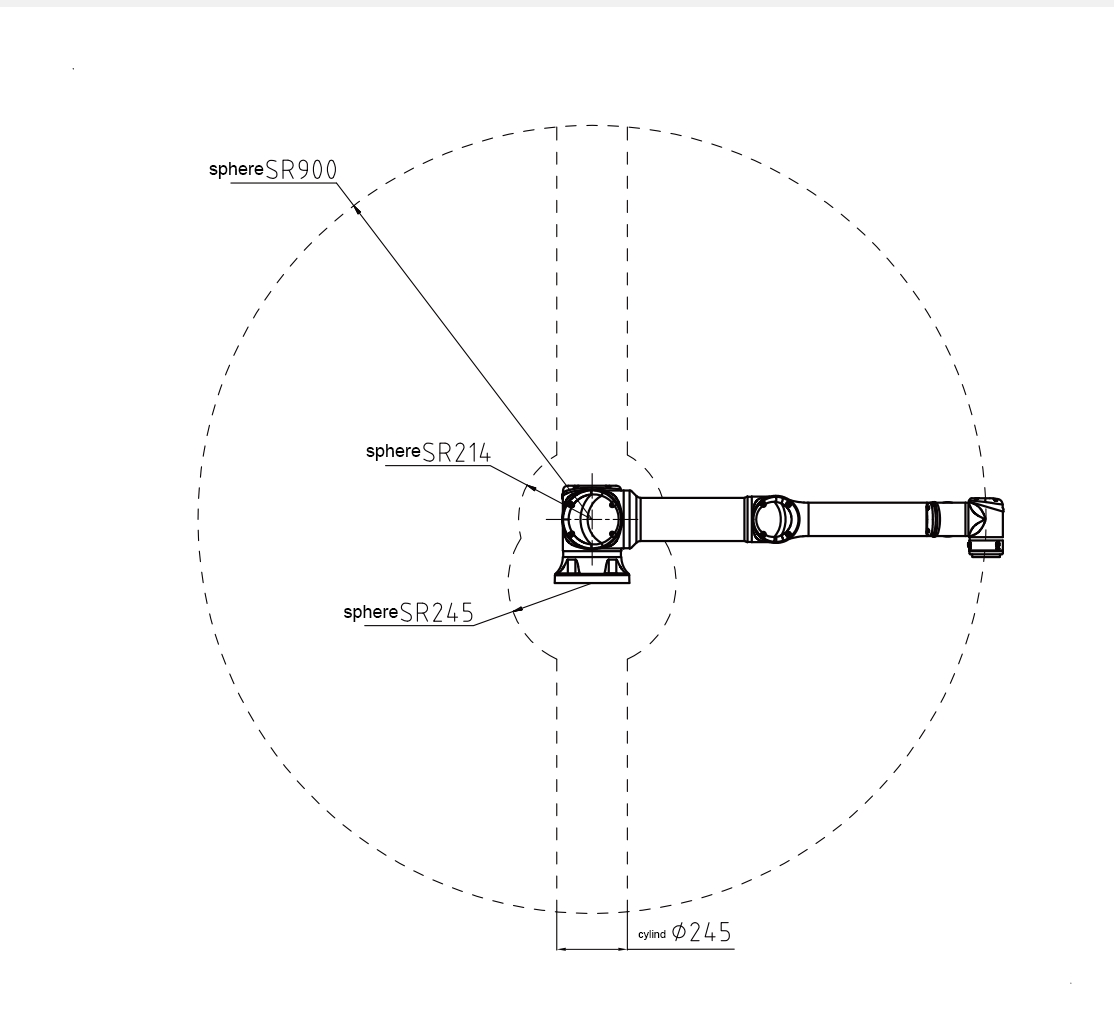
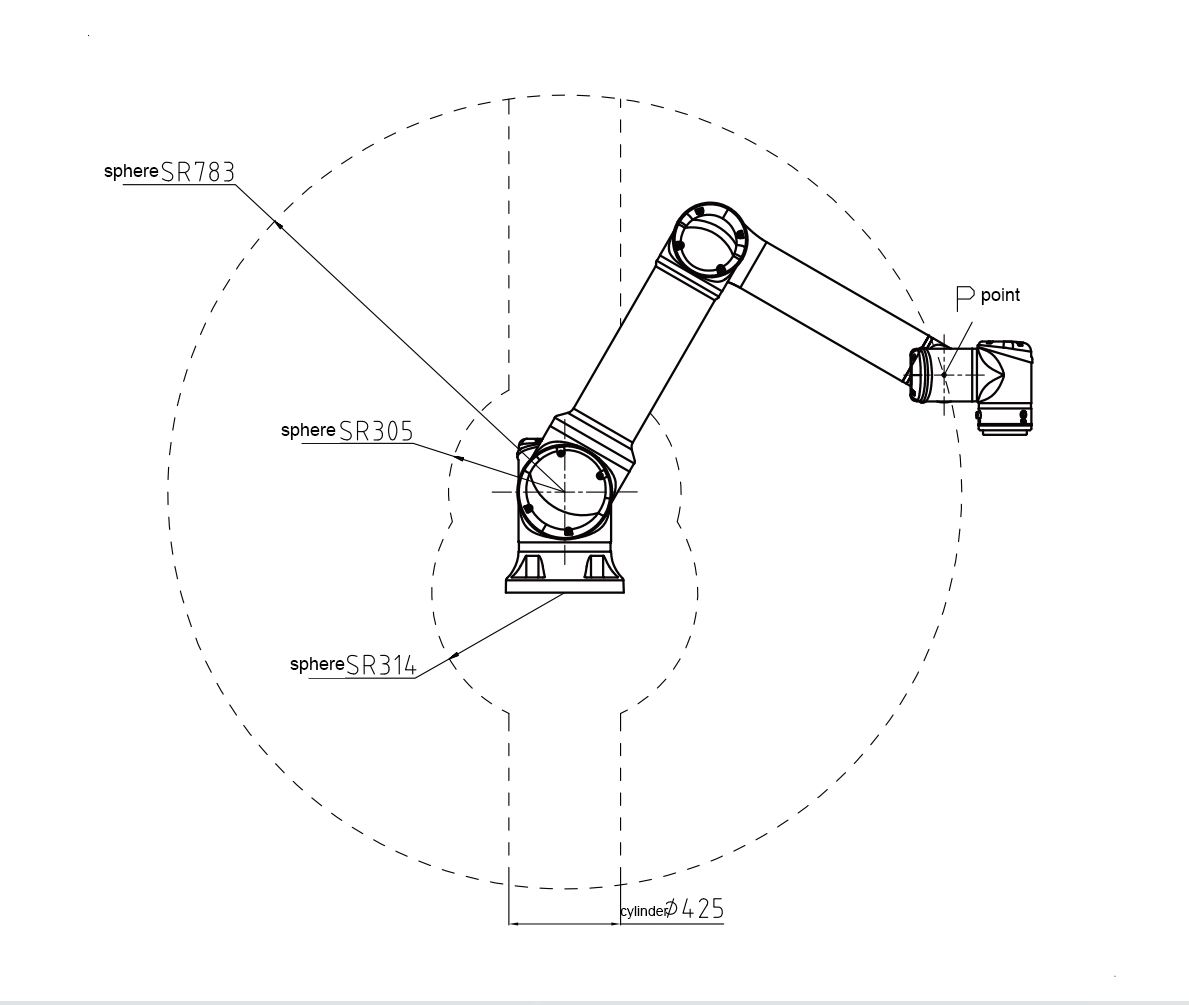
| Размах рук | 620 мм | |
| Степень свободы | 6 | |
| Движение Диапазон |
Шарнир 1 | ± 360 ° |
| Шарнир 2 | ± 360 ° | |
| Шарнир 3 | ± 360 ° | |
| Шарнир 4 | ± 360 ° | |
| Шарнир 5 | ± 360 ° | |
| Шарнир 6 | ± 360 ° | |
| Движение Скорость |
Шарнир 1 | 180 ° / с |
| Шарнир 2 | 180 ° / с | |
| Шарнир 3 | 180 ° / с | |
| Шарнир 4 | 180 ° / с | |
| Шарнир 5 | 180 ° / с | |
| Шарнир 6 | 180 ° / с | |
| Максимальная скорость ЭОА | 1m / s | |
| Повторяемая точность позиционирования (максимум) | ± 0.03mm | |
| Абсолютная точность позиционирования (максимум) | 0.5 мм | |
| Управляющая шина/частота | EtherCAT/1 кГц | |
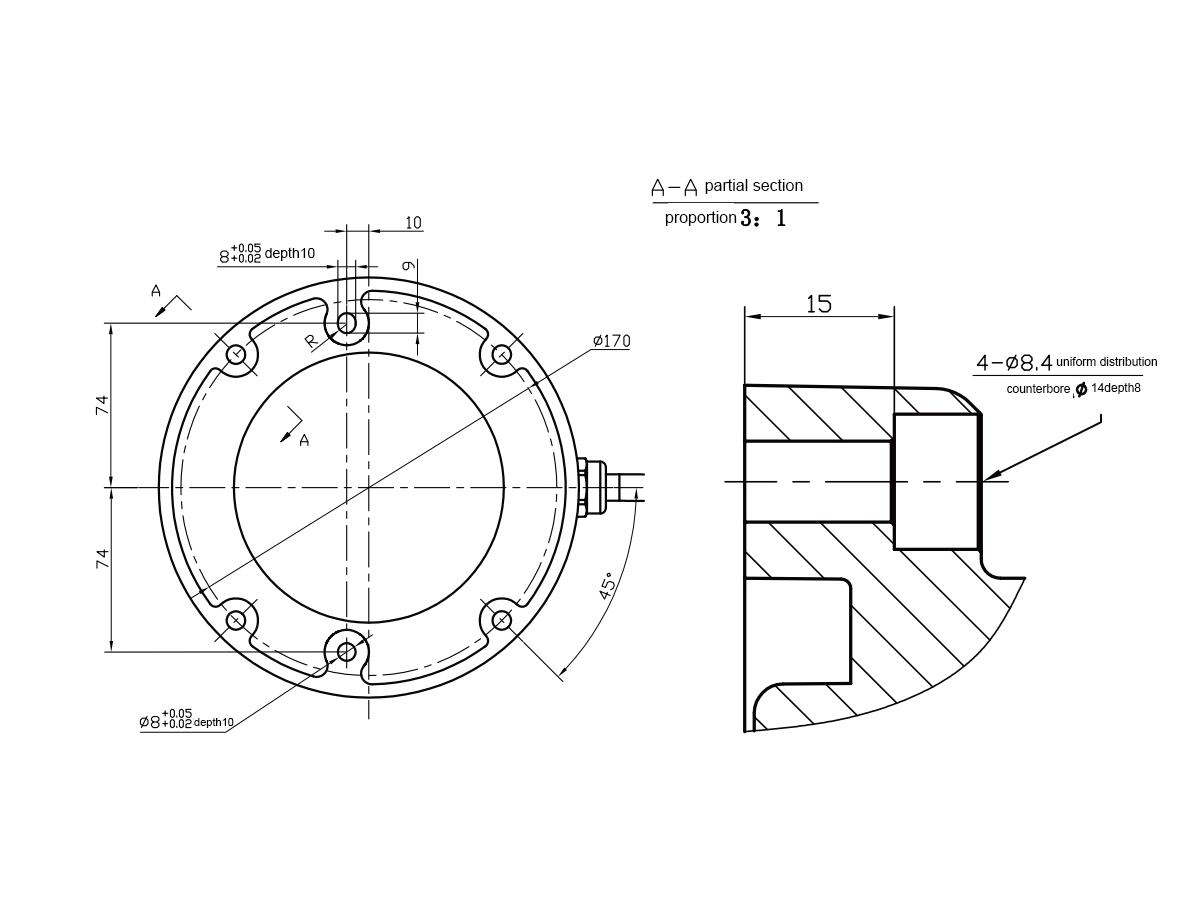
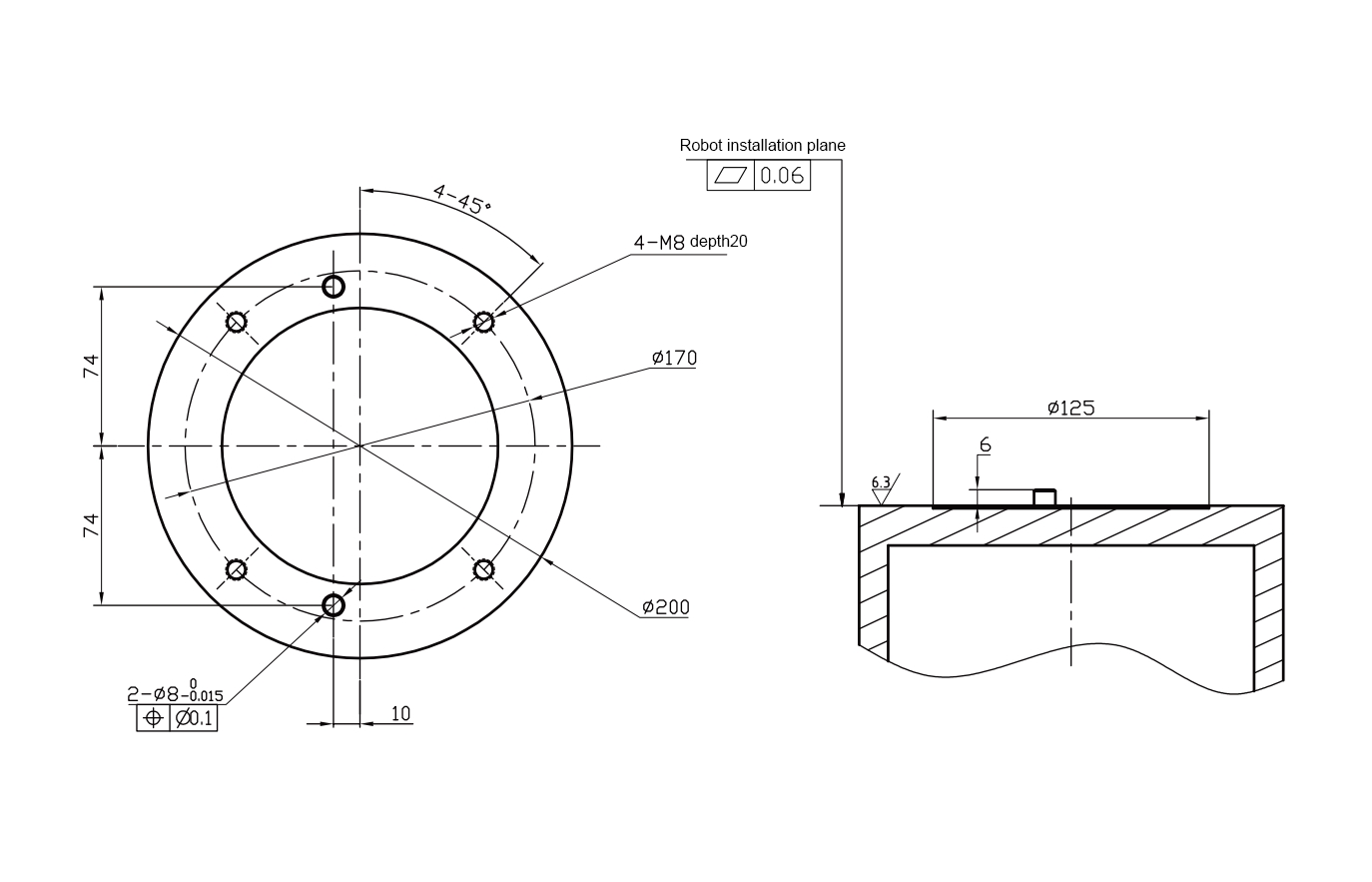
| Метод установки | под любым углом | |
| Типичная мощность | 150W | |
| Материалы | Алюминиевый сплав | |
| Температура окружающей среды | -5 ° C~55 ° C | |
| Рабочая среда (влажность) | 5%~90% относительной влажности (без конденсации) |
|
| Длина кабеля | 5m | |
| СТЕПЕНЬ IP | IP66 | |
| Шум | ≤60dB | |
| Порт ввода-вывода на конце инструмента | цифровой вход*2,цифровой выход*2, аналоговый вход*2,выходной источник питания 24 В/1 А*1 |
|
| Коммуникационный порт на конце инструмента | EtherCAT*1,RS485 * 1, выходной источник питания 24 В/1 А*1 |
|